Erfahrungsbericht: Hausbus mit Atmel AT90CAN Knoten
Projektrahmen und -konzept, Hardware, Benutzerschnittstelle
Einleitung
Projektzusammenfassung
Mein heutiger CAN (AT90CAN128 Knoten) basierter Hausbus ist die zweite
Generation einer bus-basierten Hauselektronik
Infrastruktur. Sie wurde als Freizeitprojekt und für meine
spezifischen Anforderungen in der Automation meines Heims (und Gartens) entwickelt. Wesentliche Kriterien waren und sind:
- nachträgliche Ergänzung einer traditionellen Elektro Installation,
- Schwerpunkt
1: Einführung automatisierter Schaltvorgänge (z.B.
Beleuchtungssequenzen zum Abschrecken von Einbrechern, Steuern der
Dauer und Reihenfolge von Gartenberegnungszonen),
- Schwerpunkt
2: zentrale Betätigung/Steuerung von entfernten Objekten
(Elektroinstallationen im Garten, Beleuchtung bei der Einfahrt ...).
Als erste Generation verwirklichte ich vor ca 15 Jahren einen aus
ganz wenigen Knoten bestehender
RS485
Bus mit einem einfachen Protokoll mit seriellen Datenpaketen (Motorola
HC11,
Assembler programmiert). Die Entwicklung der heutigen Lösung
(CAN, avrlibc / avrdude) begann vor mehr als drei Jahren. Eine Vorstufe
verwendete ausschliesslich Laborplatinen mit einer kommerziellen
Huckepack-Platine, die den AT90CAN128 Mikroprozessor dem 1/10 Zoll
Raster
Raster anpasste (es war im wesentlichen eine Machbarkeitsstudie), die
endgültige Version verwendet eine dafür
entwickelte Knotenplatine (2-lagig), die sowohl als unabhängiger Knoten
als auch als Huckepack-Platine für eine Laborplatine verwendet werden
kann (Anwendungsschaltungen sind verdrahtungsmässig nicht sehr
aufwändig, Herstellen anwendungsspezifischer Platinen wäre in
Anbetracht
der geringen Stückzahl übermässig teuer und aufwändig - bei der kleinen
Vielzweckplatine mit dem TQFP-64 Prozessor liegt diese Überlegung genau
umgekehrt). Eine Ausnahme hierzu ist die Rasenberegneranwendung - für
sie habe ich eine Platine anfertigen lassen, denn sie ist sehr
Verdrahtungsintensiv und ich brauchte mehrere Exemplare.
Zur Programmierung wurde von Anfang an C mit avrlibc eingesetzt, als
Programmierer verwende ich einen JTAG MK II mit Avrdude. Ich habe
Avrdude aber sehr schnell durch ein graphisches Benutzerinterface
(Frontend) ergänzt - das hat das Vorgehen beim Entwickeln und
Programmieren einer Vielzahl von ko-operierenden Knotenanwendungen
wesentlich vereinfacht: eine leistungsfähige "Produktionsumgebung" ist
ein ganz wesentlicher Hintergrund für den Erfolg meines Systems und
dessen relativ kurze Entwicklungszeit.
Das vorliegende Dokument
Meine Busumgebung ist als Projekt "im Alleingang" angelegt (vor drei
Jahren gab es zwar schon einige Hobby Hausbus Projekte, ihre
Zielsetzungen
entsprachen aber nicht meinen Anforderungen). Ich hatte von Anfang an
reichlich interne Dokumentation geschaffen, aber nie eine
Veröffentlichung oder eine Webseite ins Auge gefasst. Zurzeit ist
eine neue Generation von Projekten im Entstehen. Die für meine
Anwendung entwickelten Konzepte und Erfahrungen können hier hilfreich
sein, dazu soll die vorliegende Dokumentation beitragen. Dieses
Dokument wurde in ein paar Stunden unter Benutzung bestehender interner
Dokumentation erstellt, es ist eine Art Schnellschuss - ich habe wenig
Zeit: die Gliederung des Dokuments ist wenig elaboriert, Photos wurden
wenig gepflegt, und Texte wurden nicht von französisch auf deutsch
übersetzt (meine Umgebung spricht französisch).
Dieses html Dokument ist der erste von zwei Teilen, ein zweiter Teil über die entwickelte Software ist geplant.
Diese Beschreibung ist als eine web-fähige Dokumentation ausgelegt, die
ich ohne gegen Regeln zu verstossen auf unseren Institutsserver legen kann. Falls darüber eine
Diskussion anfängt, sollte sie im Hausbusforum von
http://www.mikrocontroller.net/ geführt werden.
Hardware: Netz und Knoten
Datenbus
Die Verdrahtung meines Netzes benützt Kategorie-5 Kabel, die beim
nachträglichen Einbau einer Einbruchsmeldeanlage als Reserve mitverlegt
worden waren. Diese Verdrahtung geht in die Nähe aller "strategisch
wichtigen" Punkte des Hauses, geht aber nicht direkt zu den 235V
Einrichtungen (ausser in Nebenräumen in Keller Dachgeschoss und
Garage). Die genaue Länge im Haus habe ich nicht gemessen (der Bus geht
ziemlich zick-zack und durch drei Stockwerke), sie wird etwas über 50 Meter
betragen, mit zusätzlich ca. 50 Meter für den Sekundärbus im Garten.
Anwendungsknoten
Die Hausbusknoten sind als kleine Subzentren konzipiert (Relais,
Schütze, optoelektronische Schalter), von denen traditionelle
Verdrahtung zu den kontrollierten Geräten geht - beim nachträglichen
Einbau eines Hausbusses wahrscheinlich die einzige gangbare Lösung.
Eine Busverlängerung zu einem Schuppen im Garten (Steuerung von
Gartenlampen und Pumpen für ein Biotop) ist mit einem CAN-CAN Koppler
angehängt (AT90CAN129 - SPI -MCP2515): dies erlaubt den Gartenbus
galvanisch mittels Optokoppler zu trennen. Diese Trennung hat ihre
Probe bravourös überstanden: ich hatte einen Blitzeinschlag, der HiFi
Anlage und Fernsehapparat getötet hat, der Bus überlebte ohne Schaden
(es war noch der alte serielle Bus, die verwendete Schaltung habe ich
beibehalten).
Der Bus (auch der Gartenbus) läuft mit 100 kBps.
Die Stromversorgung für die Knoten erfolgt im allgemeinen von den vom
am Knoten angehängten Geräten, bei Knoten ohne Spannungsversorgung (DCF
Empfänger, Temperatursonde, LED/Tastereinheiten) wird 12V über das
entsprechende Hausbussegment angeboten (die Knoten selber brauchen 5V,
das erlaubt Spannungsabfall und Störungen bei der Busverzweigung zum so
versorgten Knoten herauszuregeln). Zur Zeit gibt es 11 solche Knoten -
jeder Knoten versorgt im Mittel 5 geschaltete Element und im Mittel 2
Taster.
Die folgende Abbildung illustriert ein paar Verbraucher im Garten - von
rechts nach links der Anschluss für einen Springbrunnen im Biotop, ein
Tastenfeld, und eine Leuchte; der dazugehörige Hausbusknoten ist in
einem Schaltschrank (IP61) in einem ca 5 Meter entfernten Schuppen untergebracht.

Hier ist ein Bild des Inneren des Schaltschrankes im Gartenschuppen:

Die Trägerplatine mit dem Busknoten ist rechts oben (waagrecht) - sie
ergänzt den Knotenrechner durch den 24V -> 5V Regler, einen 74HC541
zum Puffern der binären Eingänge, und den nötigen Schraubklemmenleisten. Der
Ringkerntransformator erzeugt die 35V für eine Elektroventil für den
Wasserzulauf ins Biotop, ganz unten links ist das Vorschaltgerät für
die Gartenleuchte (ihr Vorgänger war im Leuchtenfuss - starb durch
Verrosten).
Ein Knoten verdient ein paar Bemerkungen: ich verwende einen DCF
Empfänger als Zeitbasis. Der Knoten der, diesen Empfänger betreibt,
setzt alle Sekunden eine Meldung mit Zeit und Datum auf den Bus. Ich
habe beobachtet, dass - z.B. im Sommer bei grossräumiger Gewitterlage -
der Empfang für längere Zeit (Stunden) stark gestört sein kann. Die in
diesem Knoten generierte Uhrzeit wird daher primär vom Quarz des
Prozessors erzeugt, sie wird nach Empfang eines korrekten DCF Signals
synchronisiert (gleitend: keine Sprünge). Um ein Davondriften der
quarzgenerierten Zeit bei längeren Pausen der Synchronisierung zu
vermeiden, eiche ich den Quarz: ich verwende ein Eichpolynom, mit dem -
gewichtet nach dem jeweiligen Bit in der Echtzeituhr - ich Bits zusätzlich
einspeise, bzw. unterdrücke. Das Eichpolynom ist im EEPROM des Knotens
gespeichert und wird bei Neuprogrammierung nicht geändert (die gleiche
Lösung verwende ich auch in anderen Knoten, bei der die Uhrzeit eine
wichtige Rolle spielt - dadurch macht es nichts aus, wenn Timerknoten
für eine Programmänderung kurz vom Netz geht).
Knotenrechner
Alle Knoten verwenden die gleiche Platine (44,5 x 55.5 mm - das passt
gerade noch in eine Unterputz Dose). Diese Platine wurde als
Vielzweckplatine konzipiert: die Hauptbestimmung ist ihre Verwendeung als Knoten für
den Hausbus, sie soll aber auch als unabhängiger Mikroprozessor zur
Steuerung noch nicht vorgesehener Anwendungen (nicht unbedingt am CAN Bus) dienen. Um die
Flexibilität zwischen verschiedenen Einsatzarten zu gewähren, wurde
beim Grossteil der Bestückung auf SMD Technik verzichtet. Ein- und
Ausgabe
geht über Pfostenleisten - diese sind im 1/10 Zoll Raster angeordnet um
die Knotenplatine als Sekundärplatine auf einer Laborplatte einsetzen
zu können. Es gibt Pfostenleisten für
- CAN Anschluss;
- serielle Schnittstelle (V.24);
- Standard parallel I/O (B-Register - auch für SPI zu verwenden, 2
bit des E Registers, Reset); die Verbindungen zu dieser Leiste gehen
durch einen 18-Stift DIL Sockel, siehe weiter unten. Diese
Pfostenleiste reicht für alle einfachen Anwendungen;
- extra parallel I/O (C-Register, einige ADC Eingänge);
- Pfostenleiste für JTAG Programmierung.
Die Platine braucht eine geregelte 5V Speisung (entweder von der
Pfostenleiste oder von der standard parallel Pfostenleiste - die Wahl
der Quelle ist zu stöpseln - S1, links oben); die neueste Version (fertig, aber noch
nicht getestet) hat Platz für einen zusätzlichen Speicher mit SPI (FRAM
- gleich beschaltet wie ein externer EEPROM Speicher), ich
möchte einige Anwendungen mit 64 kBit FRAM betreiben. Hier
ist ein Photo der vorgestern gelieferten und bestückten neuen
Version der Platine (30 Stück für 228 Euro). Die Programmierung
und Inbetriebnahme des FRAM - der SMD links oben - ist noch nicht in
Angriff genommen.
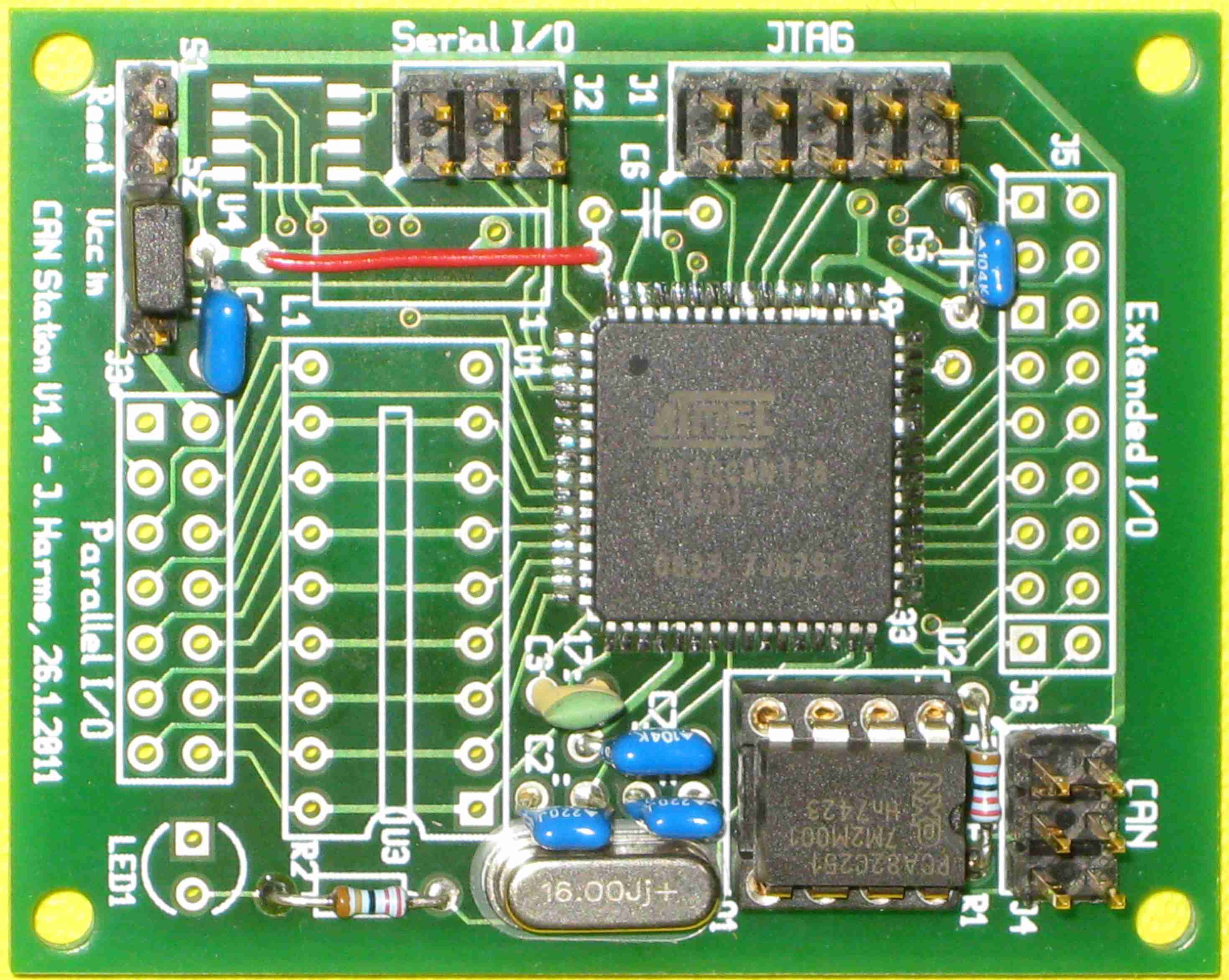
Der
Platz für einen DIL IC (U3) dient zur optionalen Aufnahme eines ULN2803
als Treiber für - z.B. - Relais und Schütze. Wenn solch ein Treiber
eingebaut wird, müssen vorher die Verbindung zwischen Ein- und Ausgang
getrennt werden (weiss umrahmt).
Entscheidungskriterien für AT90CAN
Die Entscheidung von Motorola (HC11 oder 12 Familie) auf Atmel
umzusteigen wurde nach langem Suchen im Netz gefällt. Der
ausschlaggebende Grund für diese Wahl war die Qualitäte und Intensität des Austausches
von Erfahrungen und Ratschlägen zwischen Benutzern, (Avrfreaks,
avr-chat@nongnu.org und avr-gcc-lst@nongnu.org) und die
Unterstützung von avrlibc durch - ich nehme an Atmel. Zweiter wichtiger
- aber
erst zweiter - Grund war der Umfang und die Qualität der Funktionen,
die ich gratis vom Prozessor bekomme. Meine ersten Gehversuche mit CAN
machte ich allerdings mit einem MCP2515, sah aber schnell, dass ich mit
einem
AT90CAN besser fahre (ich habe auf den AT90CAN128 "standardisiert" weil
ich mich auf eine einzige Knotenausführung beschränken will; der etwas
höhere Preis der
grossen Ausführung war mir den Luxus wert, keine Kapazitätssorgen zu
haben - vor allem für RAM). Meine Anwendungen verwenden maximal 1/4 des
verfügbaren FLASH
Speichers. RAM ist theoretisch knapp, aber durch bewusstes
Berücksichtigen dieser Grenze habe ich auch hier noch ziemlich grosse
Reserven.
In ein CAN Hausbusprojekt zu investieren ist - was den persönlichen
Zeitaufwand betrifft - eine einschneidende Entscheidung. Bei der
Entscheidung für eine Architektur sollten bestehende Erfahrungen mit
einer bestimmten Prozessorumgebung, aber auch ein paar Euro Unterschied
beim Einkauf der Hardware als völlig sekundär abgetan werden.
Benutzerschnittstellen
Es gibt zwei Arten von Benutzerschnittstellen: (1) Tasten und
Tastenfelder - auch mit LED Zustandsanzeige, und (2) Touchpanel LCD
Bedieneinheiten. Ich habe bewusst die Steuerung durch einen PC
ausgeschlossen: die Anlage muss ohne laufenden PC funktionieren (die
PCs muss ich ausschalten können, ohne das Funktionieren des Hausbus zu
beinträchtigen).
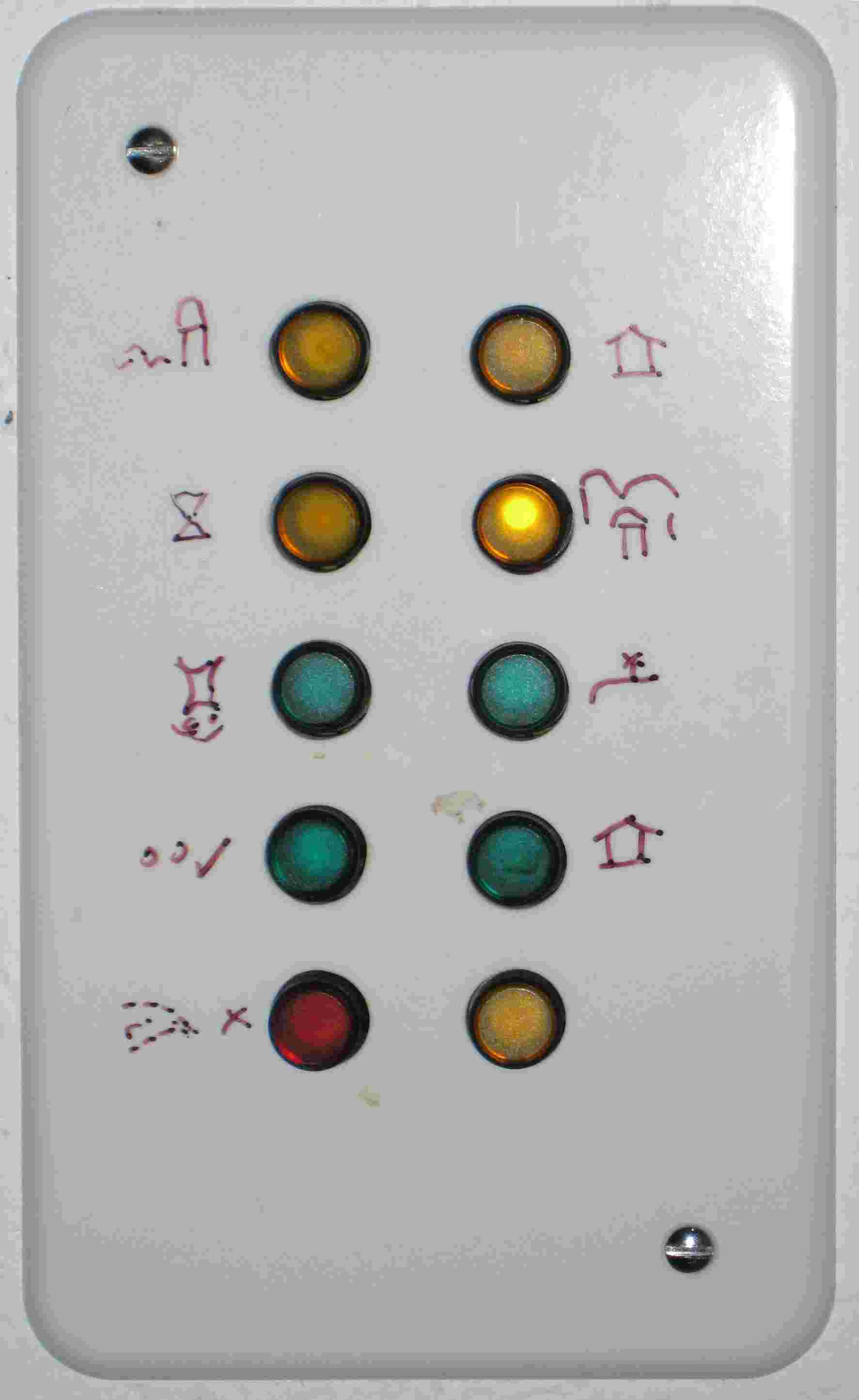
Tasten und Tastenfelder
Zu den Tasten ist wenig zu sagen - ausser dass ein gegebenes Gerät
durch beliebig viele Tasten gesteuert werden kann, und dass
Tastenkontrolle und Displaykontrolle einander nicht ausschliessen. Die
folgende Abbildung zeigt ein als Unterputzdose aufgebautes Tastenfeld
mit LED Statusanzeige (Selbstbau auf Basis Leerdose, die Knotenplatine
ist
in der Dose untergebracht).
Touchpanel Display
Die
Displayeinheit besteht aus einem Knotenrechner und einem mittels
SPI angeschlossenen eDIP 240 (240 x 128 Pixel mit Touchpanel). Dies ist
eine ziemlich teure Lösung - aber ungeheuer angenehm zu nutzen
- ich erwäge sogar den Ersatz durch die etwas grössere 320 x 240
Ausfḧrung (noch teurer) - es ist schwierig alle nötigen Schaltflächen
und Texte in 240 x 128 Pixel unterzubringen. Auch wenn ich - aus
Kostengründen - zurzeit nur eine Einheit verwirklicht habe, sieht das
Konzept die Koexistenz mehrer solcher Einheiten vor (weil jede Einheit
die
Konfiguration ändern kann ist eine Token-basierte Exklusivitäts-Reglung
vorgesehen). Da diese Einheit auch nur ein Netzknoten ist,
kann sie während des Urlaubs leicht von ihrem normalen Standort im Haus
in die Garage verpflanzt werden damit sie meine hilfreichen Geister
bedienen können.
Die Displayeinheit hat drei wesentliche Aufgaben:
- Bedienung (Ein- und Ausschalten) beliebiger Geräte von einer (oder mehreren) zentralen Schaltzentrale,
- Programmierung von Ereignissen (zu einer gegebenen Zeit an
gegebenen Wochentagen) ein- und ausschalten, Parameterwahl (Dauer
nach der ein Gerät automatisch abschaltet),
- Zustandsanzeige
(Zeit, Aussentemperatur, Version und Erstellungszeit aller
Knotenprogramme, Liste der am jeweiligen Tag aktivierte Ereignisse).
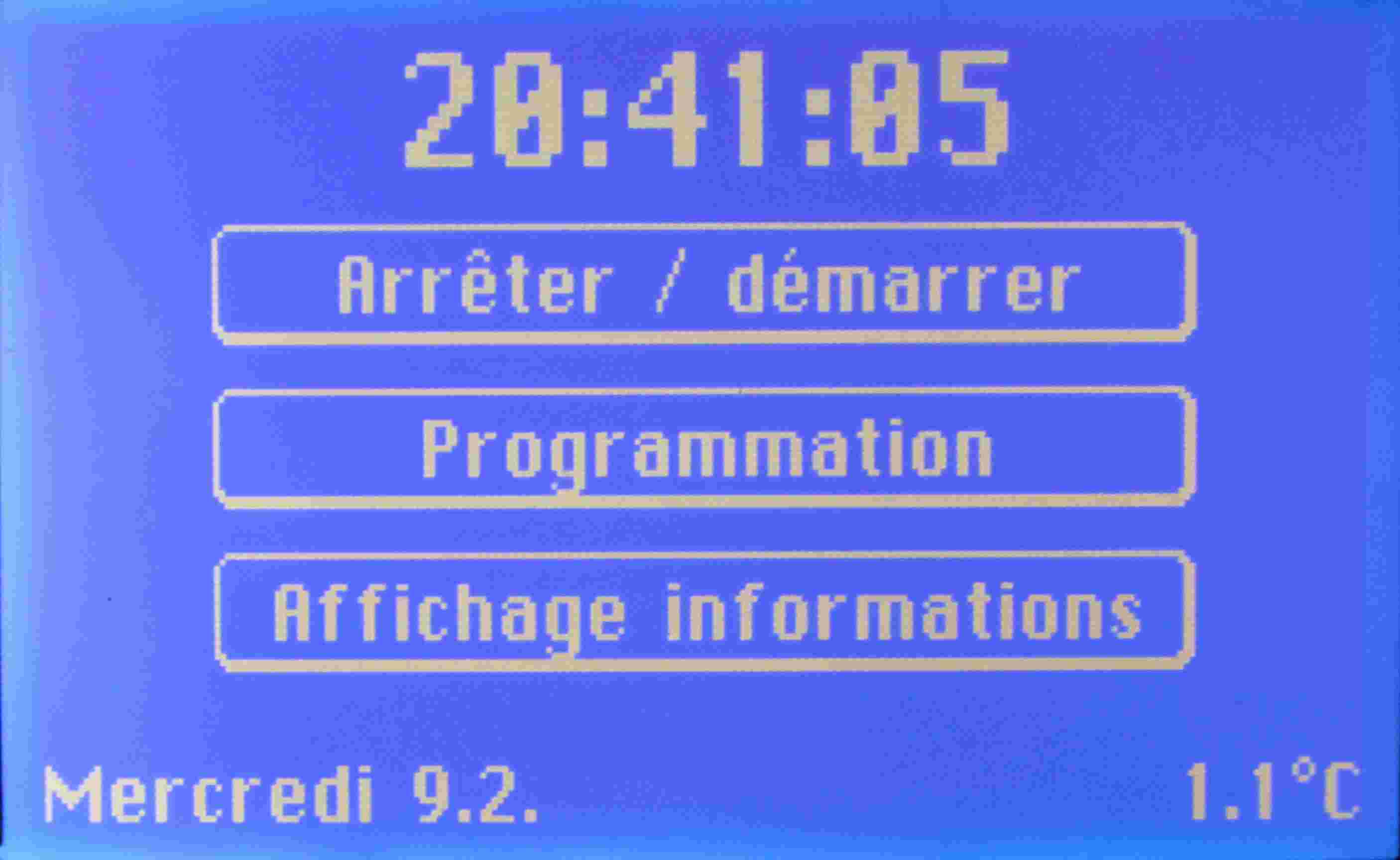
Ein paar Bildschirmphotos erläutern diese Schnittstelle. Das erste
davon zeigt den Ruhebildschirm und die drei durch ihn zugänglichen
Funktionsmodi: (1) Geräte ein- und ausschalten, (2) Programmierung, (3)
Zustandsanzeige.
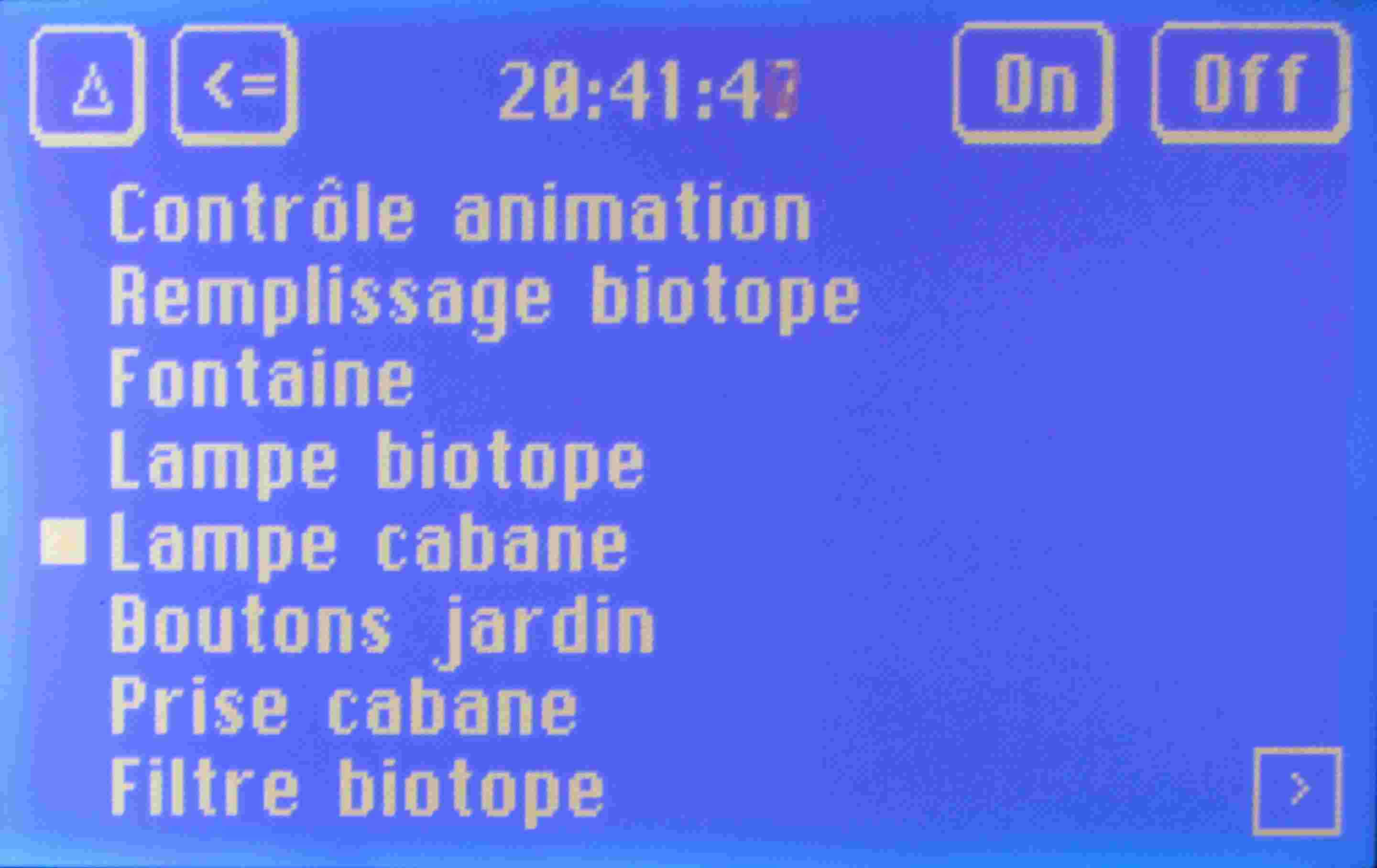
Die nächsten beiden Beispiele illustrieren die Schalterfunktion: das
linke zeigt, dass nur die Schuppenlampe eingeschaltet ist (für eine
Zustandsänderung muss zunächst eine Schaltfläche gewählt, und dann mit
"On" oder "Off" ausgelöst werden), das rechte zeigt ein Gerät
(Rasenberegnung), das sich nach einer bestimmten Zeit automatisch
abschalten wird.

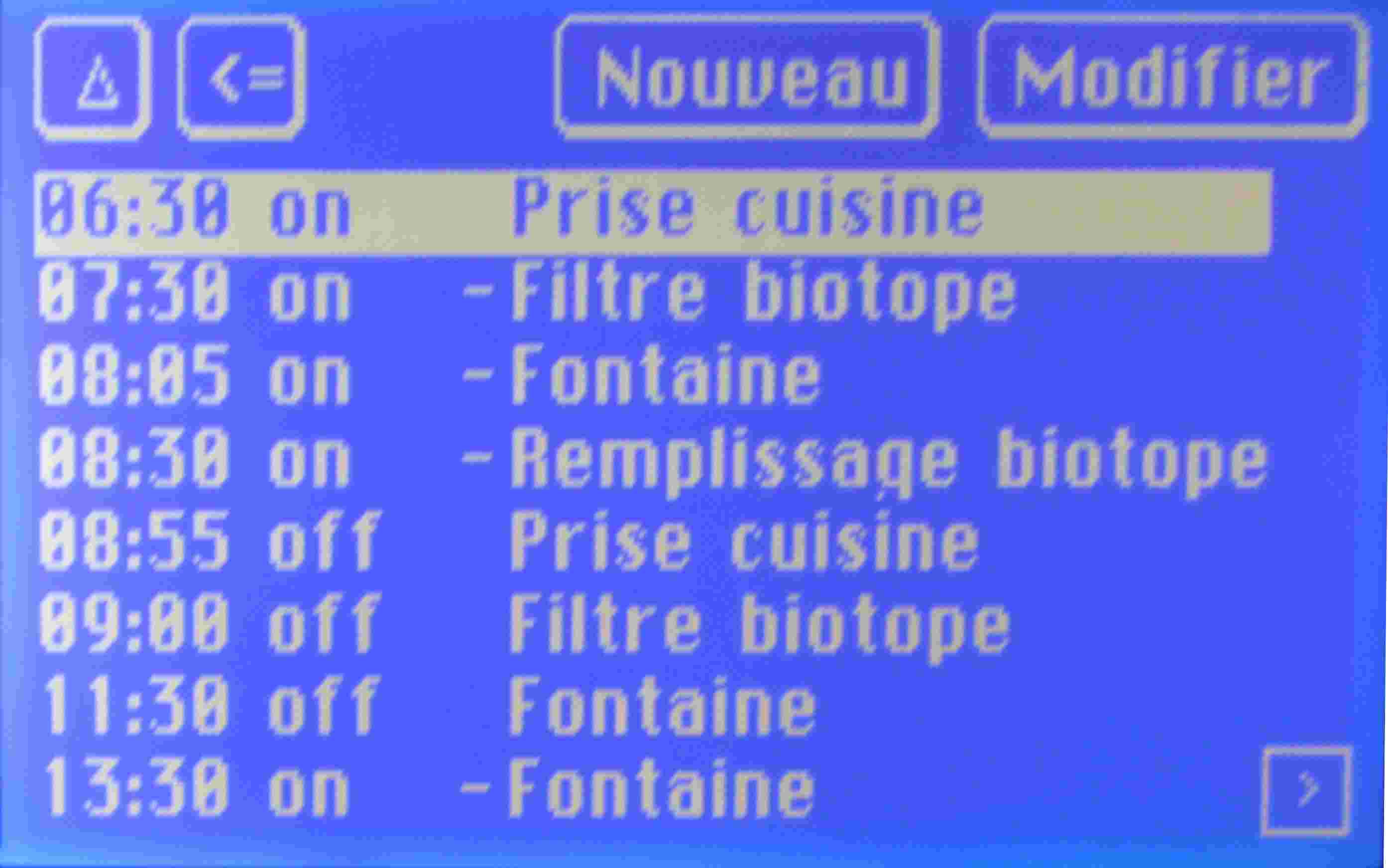
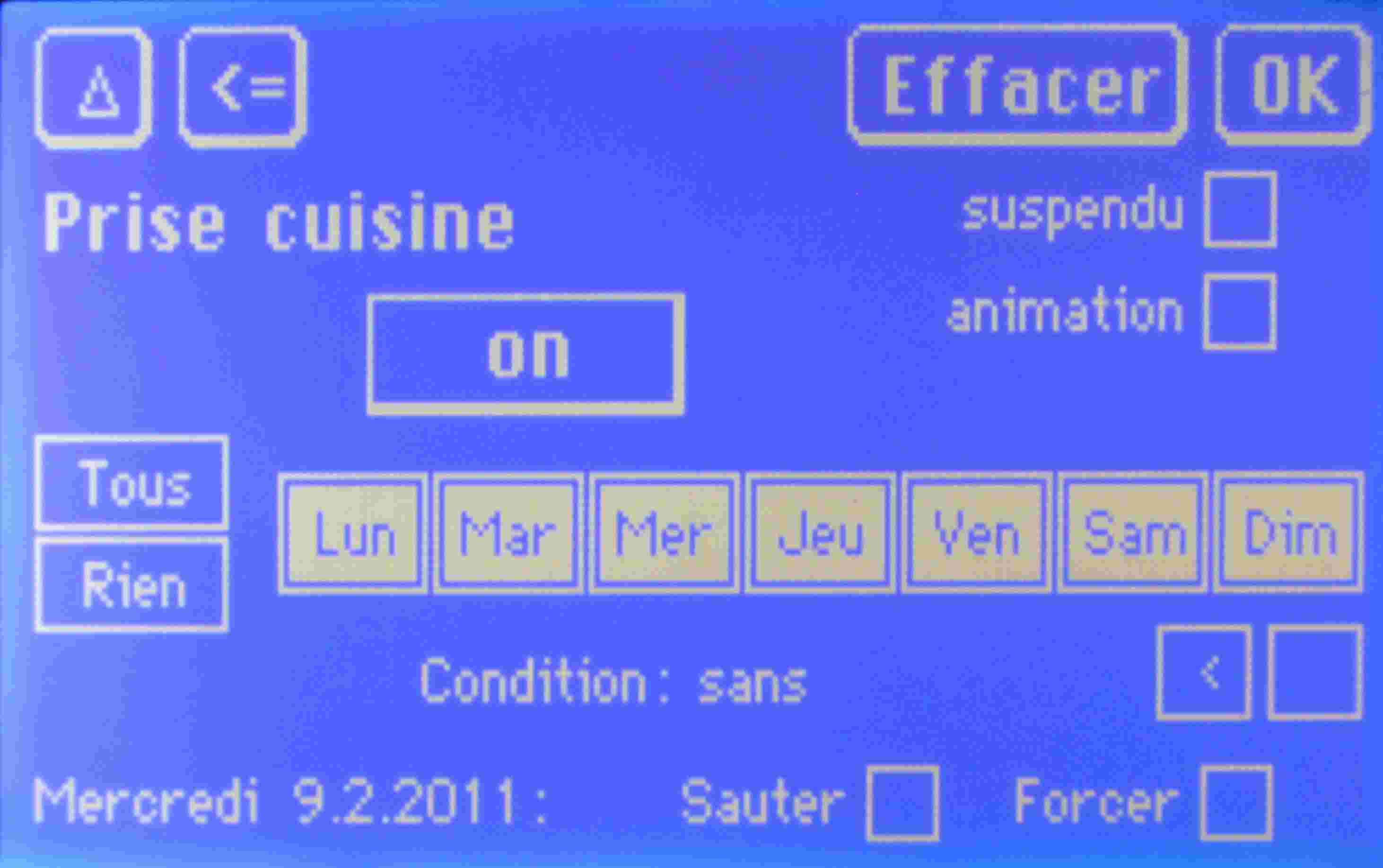
Die folgenden zwei Bilder erläutern der Programmierfunktion. Das linke
zeigt, wie aus der Liste aller definierten Ereignisse eines zum
Editieren ausgewählt wird (für jedes Ereignis erscheint der Zeitpunkt,
die Aktion und der Name des Gerätes - ein "Minus" Zeichen bedeutet, das
am gegenwärtigen Tag das Ereignis nicht geplant geplant oder
unterdrückt ist - auswählen durch Berühren der entsprechenden Fläche); das rechte illustriert den Ereigniseditor:
- die Wahl der Funktion - beim Antippen ist zwischen "on", "off" oder "toggle" zu wählen;
- links neben der Funktion sollte man die Aktivierungs Uhrzeit des Ereignisses blinken sehen (das
habe ich beim schnellen Photographieren nicht erwischt); die Zeit wird
mit zwei mechanischen Tastern hinauf- oder hinuntergesetzt, mechanische
Taster sind leider nötig weil Auto-Repetieren mit dem eDIP nicht
zufriedenstellen zu programmieren ist;
- die Wochentage, an denen das Ereignis zu aktivieren ist, und Vorwahltasten dafür;
- "suspendu" und "animation" legen Eigenschaften für das Ereignis fest:
- suspendu: das Ereignis bleibt voll definiert, ist aber
bis auf weiteres suspendiert (nötig z.B. für Wasserpumpen im Winter);
- animation: das Ereignis gehört zur Gruppe der Ereignisse die
als Einbruchsabwehr vorgesehen sind - diese Gruppe kann als ganzes ein-
und ausgeschaltet werden;
- mit
"sauter" (Überspringen) und "forcer" (Zwingen) kann am
jeweiligen Tage die Programmierung "überstimmt" werden: ein Ereignis
kann diesen Tag unterdrückt werden, auch wenn seine Ausführung
programmiert ist, und - umgekehrt - seine Ausführung kann diesen Tag
erzwungen werden, auch wenn sie nicht programmiert ist; das ist eine
sehr praktische Einrichtung, sie erlaubt morgens vor dem Weggehen
Aktionen für den weiteren Tagesverlauf festgzulegen ohne viel zu
programmieren (diese beiden Funktionen haben einen Schnellzugriff);
- ich will auch bedingte Ereignisse ermöglichen - das ist komplex
und ich habe es bisher nicht gebraucht, ist daher noch nicht
programmiert.
Das letzte Bild zeigt eine Verwaltungsfunktion, mit deren Hilfe man
abfragt, welche Knoten am Netz existieren (das Bild zeigt nicht alle
Knoten, die ich momentan habe) und welche Programme jeweils geladen
sind. Für normal haben die Knoten unterschiedliche Versionen und
Erstellungsdaten - die hier sichtbare Uniformität ist Folge eine
Diskussion im Mikrocontroller.net Hausbusforum: sie hat mich auf einen Fehler
in meinem Protokoll aufmerksam gemacht (ein Fehler der sich bisher nie
manifestiert hat, aber der mit sehr geringer Wahrscheinlichkeit auftreten
könnte); dessen Behebung hat Neuladen aller Knoten erfordert. Dieses Bild zeigt auch, dass - ich verwende keinen Bootstrap
über das Netz sondern lade mit JTAG - eine volle Neukonfigurierung
aller Knoten ca. 1 Stunde Arbeit ist.

Dieses Thema muss dringend ausgebaut werden: ich möchte nicht nur die
anwendungsbedingte logische CPU ID kennen (die wird angezeigt), sonder
auch wissen welche physische CPU montiert ist, ich möchte den Stand
eines
Bootstrap-Zählers kennen und wissen wann der Knoten das letzte Mal
hochgefahren ist - das sollte ich in den nächsten Tagen erledigen (aber
Eile mit Weile: ich habe in einem langen Informatikerleben gelernt,
dass Versionen Zeit brauchen bis man ihrer sicher ist -
"Versionshektik" ist gefährlich).
Ähnlich - und das fehlt noch vollkommen- möchte ich gerne Aussagen über
die Gesundheit des CAN-Bus haben: nicht erkannte Meldungen
(Anwendungsebene) loggen, CAN Fehlermeldungen analysieren und loggen.
Es ist zwar grossartig der Meinung sein zu können, dass mein System
ohne jeden Fehler läuft, aber diese Aussage sollte nicht auf den
Beobachtungen des Benutzers beruhen, sondern auf gemessenen Daten.
Werkzeuge
Schaltungen, Entwicklung der Platinen
Ich bin ein Linux Benutzer und verwende Geda Werkzeuge:
gschem zum Zeichnen, PCB für den Entwurf der Platine (gschem liefert
eine Datei mit einer "Netzbeschreibung", die von PCB gelesen wird und
der Erkennung von Fehlern im
Platinenentwurf dient) - sehr empfehlenswert: gut
dokumentiert, leicht zu verwenden und zu lernen, kostet nichts, und die
erzeugten Daten können direkt an Layoutfirmen geschickt werden.
Programmentwicklung
Ich habe mich für Programmieren in C und die avrlibc Bibliothek entschieden. Für das Laden der Objektdateien verwende ich einen JTAG MKII Programmierer und das avrdude
Programm. Alle meine Knotenpogramme enthalten einen Uart Modul, damit
können Meldungen - z.B. mittels printf - über die serielle
Schnittstelle an einen
Terminalemulator (ich verwende das Minicom) geschickt werden. Das ist
ein
wenig barbarisch, reicht aber (diese Methode ist allerdings in einer
Echtzeitumgebung mit parallelen Ereignisabläufen mit Bedacht zu
verwenden). Natürlich habe ich für die
Entwicklung einen eigenen kleinen Bus (ca. 5 Knoten),
Programmerweiterungen gehen nur nach sorgfältiger Prüfung "in
Produktion".
Ich habe mich sehr schnell an den praktischen Grenzen eines
zeilengesteuerten Programmierwerkzeugs (avrdude) gestossen und ein GUI
Programm dafür geschrieben ("Avrgui", auf Basis Perl - Tk, Gliederung
in
Tk-Notebook Seiten). Das
ist nicht nur ein Vergnügen beim Verwenden, es ist meiner Meinung nach
eine ganz wesentliche Voraussetzung für die Produktivität bei der
Entwicklung und das sichere Meistern der
Programmierung mehrerer ko-operierender Prozessoren. Die folgenden
Bilder illustrieren die Vorteile dieses Ansatzes.
Das erste Bild spricht für sich selbst: diese Notebook-Seite dient dem Laden und Holen von Objekt-Kode.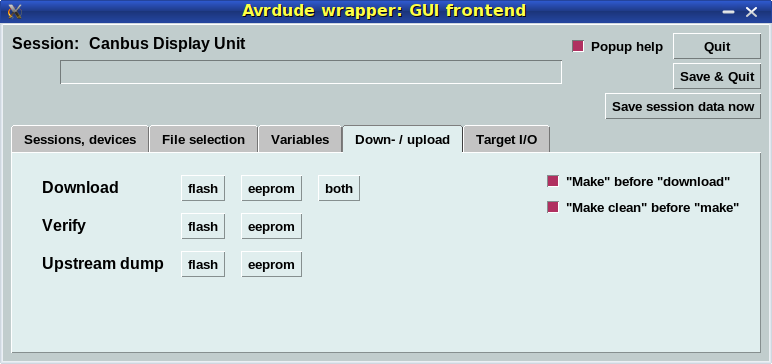
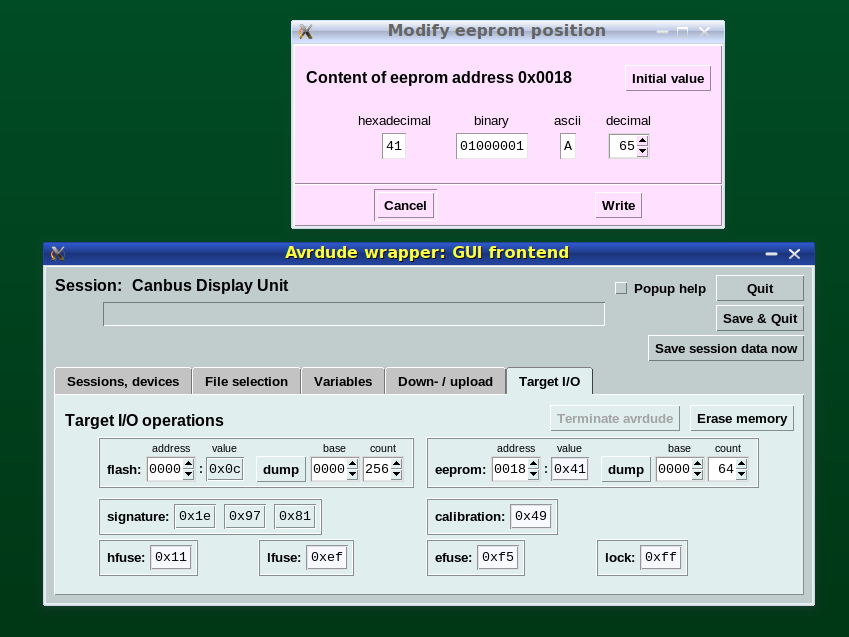
Die zweite dem direkten Umgang mit dem Objekt-Prozessor gewidmete
Seite dient dem Zugriff auf Speicher und auf Register
des Prozessors
Alle anderen Seiten dienen dem Projektmanagement:
- Öffnen der ersten (oder zusätzlicher) Programmiersitzungen
(avrgui erlaubt den JTAG zwischen mehreren Mikroprozessoren phasenweise
zu multiplexen - eine "Sitzung" ist die Verbindung eines Avrgui
Fensters mit einem Mikroprozessor; das jeweils aktive Fenster am
Bildschirm verwendet den JTAG Programmierer, es entspricht der aktiven
Sitzung, alle anderen Sitzungen schlafen),
- Wahl des Verzeichnisses in dem für jede Sitzung die Beschreibung des Projektes und die Objekt Programme liegen,
- Definition der Parameter für Hardware (Programmiergerät, Mikroprozessor, Verbindungsdaten),
- Parametrisierung der Anwendungssoftware.
Der letzte Punkt (Parametrisierung) ist besonders wichtig: viele
Aktoren sind einander sehr ähnlich, unterscheiden sich nur über ein
paar Eigenheiten in der Eingabe/Ausgabe und in den Adressen der
anzusteuernden Geräte und Bits. Für eine Gruppe ähnlicher Aktoren gibt
es daher nur ein Programm und nur eine Projektdatei; vor dem Laden kann
Avrgui eine Neugenerierung der Objektdatei aufrufen (mithilfe des Make
Werkzeuges von Unix) und dabei Parameter zur Individualisierung
festlegen und in den generierten und geladenen Kode einbauen. Das
vereinfacht die Programmentwicklung ungeheuer, wäre mit dem
zeilengesteuerten Avrdude (oder mit Skripts) sehr mühsam und anfällig
auf
Benutzungsfehler. Das folgende Bild zeigt, wie einfach das mit Avrgui
ist: der Parameter "DEVICE_PARAM" wird auf "GARDEN_COUPLER"
gesetzt, die automatische Programmgenerierung vor dem
nächsten Laden wird somit den Aktor mit dem so gewählten Parameter
generieren (im Quellkode gibt es entsprechende #if - #endif Blöcke).

Zu diesem Konzept gehört natürlich auch eine vernünftige
Strukturierung der Projektverzeichnisse - der Datei-Baum sieht bei mir
so aus
.../canbus/code/share/...
hier liegt der Quellkode aller
Bibiliotheksprogramme, sowie die Dateien für die Definitionen von
Konstanten und Datenstrukturen (xxx.h Dateien), die für alle Knoten
gleich sind;
.../canbus/code/timer/...
diese Datei enthält (a) alle für den
Timer Knoten spezifischen Quellprogramme, (b) die Daten für die
Individualisierung von Avrgui für diesen Knoten (.avrguirc) und
(c) Verknüpfungen zu den relevanten Bibliotheksdateien und Definitionen im Verzeichnis
"share";
und so fort für alle Knotendateien.
Diese Beschreibung geht (zu?) weit ins Detail, aber die Bedeutung eines
soliden Konzepts erscheint mir sehr wichtig - und wird noch wichtiger
wenn das Projekt wächst und mehrere Entwickler daran
arbeiten. Diese Art Struktur eignet sich auch als Grundlage für eine
Projektverwaltung mit z.B. cvs (ein Korsett das ich ungerne verwende).
Zusammenfassung, Erfahrungen
Meine Anwendung läuft in ihre jetzigen Form seit mehr als 2 1/2 Jahren
zu voller Zufriedenheit. Ich hatte nie ernsthafte Probleme gehabt (ganz
wenige Male - z.B. in der Display Einheit - sind Programmierfehler
erst im Betrieb sichtbar geworden). Abgesehen vom Echtzeitrahmen (siehe
unten) wüsste ich nicht, wie es besser zu machen wäre; die Wahl der
Hardware ist richtig (wenn ich morgen neu anfinge, würde ich genau die
gleiche Wahl treffen). Ich habe nie Hinweise auf Dysfunktionen des
Netzes (z.B.
Neustart von Knoten, schlechte Antwortzeit) beobachtet, nach Störungen
in der 235 V Versorgung gab es nie Probleme - aber, wie weiter oben
erwähnt, sollte ich hierzu ein paar Daten sammeln.
Der grosse
Punkt, der mich besorgt macht, ist der Ein-Mann Rahmen: was passiert, wenn ich morgen
einen schweren Autounfall habe? Ein paar Fragen haben heute positive Antworten: kann ich einen TQFP-64
auflöten? (Antwort: ja, bisher gab es keinen Verschnitt), komme ich
ohne ein Oszilloskop aus (Antwort ja, ein Vielfachmessgerät und und ein
paar Prüf-LEDs tun es auch).
Natürlich gibt es eine lange Wunschliste von zu machenden
Erweiterungen:
- sammeln von Daten über das klaglose Funktionieren aller Knoten und des Netzes,
- Erstellen
einer Log-Einrichtung,
- Ersatz des Echtzeitkonzeptes (Warteschleife mit
Callbackfunktionen) durch ein Echtzeitsystem mit Prozessen (der Ansatz
mit der Warteschleife läuft tadellos, ist aber nicht einfach zu
durchschauen und intellektuell unbefriedigend),
- eine Menge
Kästchen bauen - viel zu viel Knoten hängen irgenwie wie Schwalbennester
an der Wand,
- wie kann ich meinen Hausbus noch besser für
Sicherheit gegen Einbruch einsetzen (ich habe eine kommerzielle
Alarmanlage, der Hausbus kann überzeugend "son et lumière" spielen -
gibt es da weitere Ideen?);
- ein Knoten mit Grossanzeige für Zeit + Datum + Temperatur,
- Erstellen einer Brücke zu meinem Ethernet LAN (nicht für
Steuerung, sondern für die Übertragung von Log Daten, eventuell
einloggen von unterwegs);
- Sensoren für Lichtstärke, Sonnenlicht, Regen und Einführen von
konditionierten Ergeignissen, die entsprechende Variablen benutzen.
juergen.harms@unige.ch
10. 2. 2011